کنترل فضای حالت بعنوان یکی از شاخههای اصلی تئوری کنترل مورد توجه بسیاری از دانشمندان قرار گرفته است. همچنین تحقیقات زیادی بر روی این مبحث انجام میپذیرد. کاربرد عملی این شاخه از کنترل نیز بیشتر معطوف به کاربردهای هدایت و ناوبری سیستمهای پروازی میباشد. علیرغم اینکه اکثر سیستمهای واقعی دارای دینامیک غیرخطی میباشند، با توجه به اینکه اهداف کنترلی در ناحیه کاری کوچکی برای سیستم دنبال میشود، خطی سازی و استفاده از مدلهای خطی پر کاربرد میباشد. آشنایی با نحوه شبیه سازی سیستم های خطی در فضای حالت و کنترل این سیستمها برای هر مهندسی ضروری میباشد. در بسته آماده شده، برنامهای برای شبیه سازی سیستمهای خطی و طراحی کنترلر فضای حالت با جایابی قطبها و طراحی رویتگر حالت نوشته شده است که برای شروع کار با سیستمهای خطی (و حتی غیرخطی) بسیار مناسب میباشد. برنامه در زبان برنامه نویسی پایتون که به سرعت در حال گرفتن جایگاه نرم افزار متلب میباشد نوشته شده است. برای نوشتن برنامه از کتابخانههای Numpy، SciPy و Matplotlib استفاده شده است. برای استفاده از این کد آشنایی متوسطی با زبان برنامهنویسی پایتون و کتابخانههای مذکور مورد نیاز میباشد.
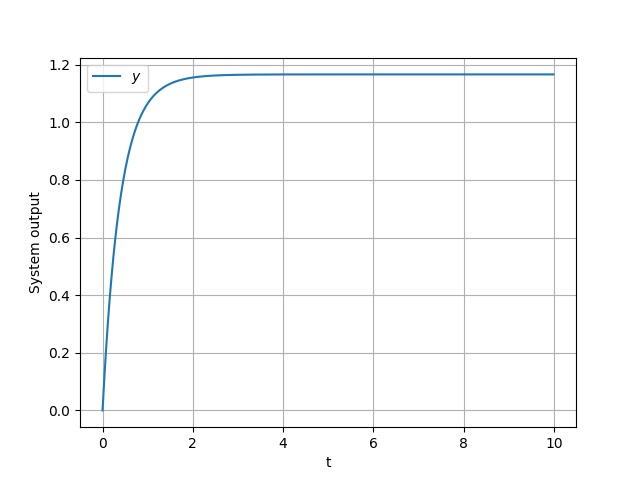
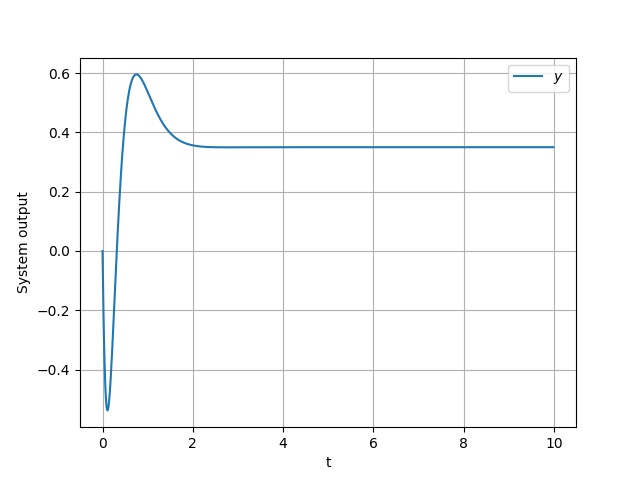
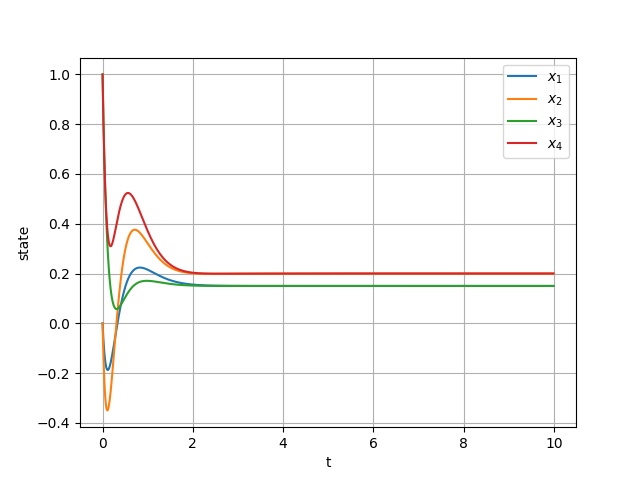
خروجی شبیهسازیهای این برنامه به شکل زیر میباشد:
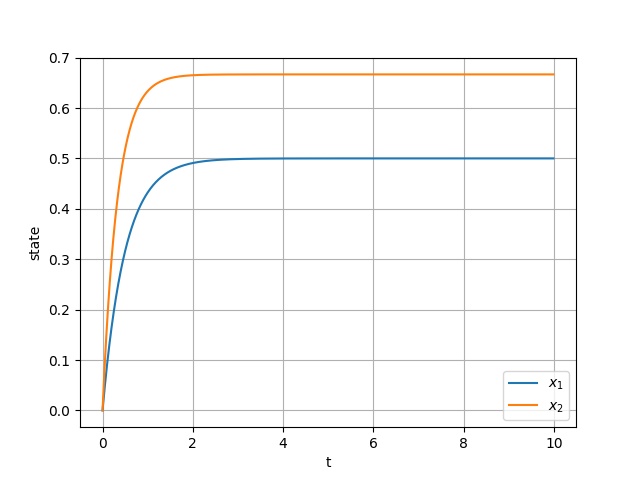
۱) خروجی سیستم و حالتهای سیستم به ورودی پله واحد بدون کنترلر
۲) خروجی سیستم و حالتهای سیستم به ورودی پله واحد با کنترلر فضای حالت بدون استفاده از رویتگر
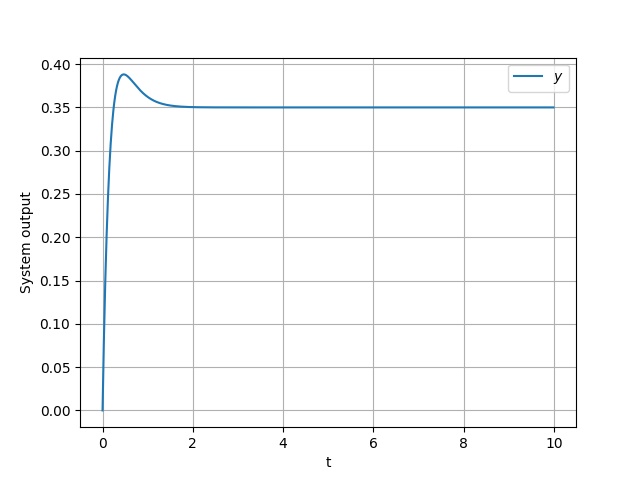
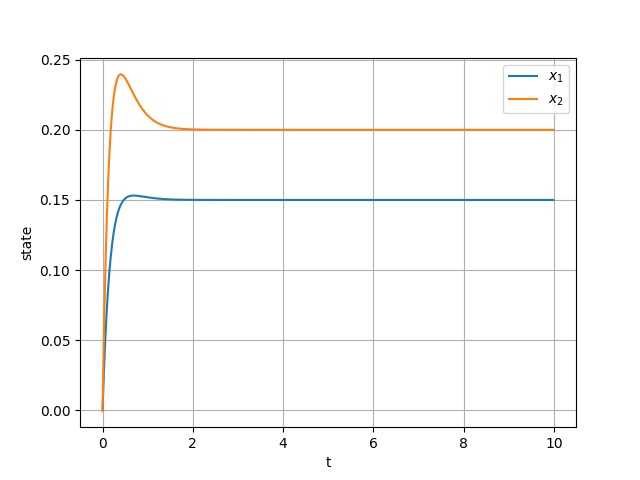
۳) خروجی سیستم و حالتهای سیستم به ورودی پله واحد با کنترلر حالت و رویتگر (همانطور که مشاهده می شود با نزدیکتر شدن مدل و کنترلر به حالت عملی و واقعی، عمل کنترل دشوارتر میشود و نیاز به تامل بیشتری در طراحی دارد. وجود فروجهش برای بسیاری از سیستمها بخصوص الکتریکی قابل قبول نمی باشد و بایستی با در نظر گرفتن tradeoff ها اصلاح گردد.)
 امیدواریم که از خرید این بسته نهایت رضایت را داشته باشید.
امیدواریم که از خرید این بسته نهایت رضایت را داشته باشید.
محتویات بسته:
- فایل برنامه شبیهسازی و کنترل سیستم خطی در فضای حالت با استفاده از جایابی قطب و رویتگر حالت